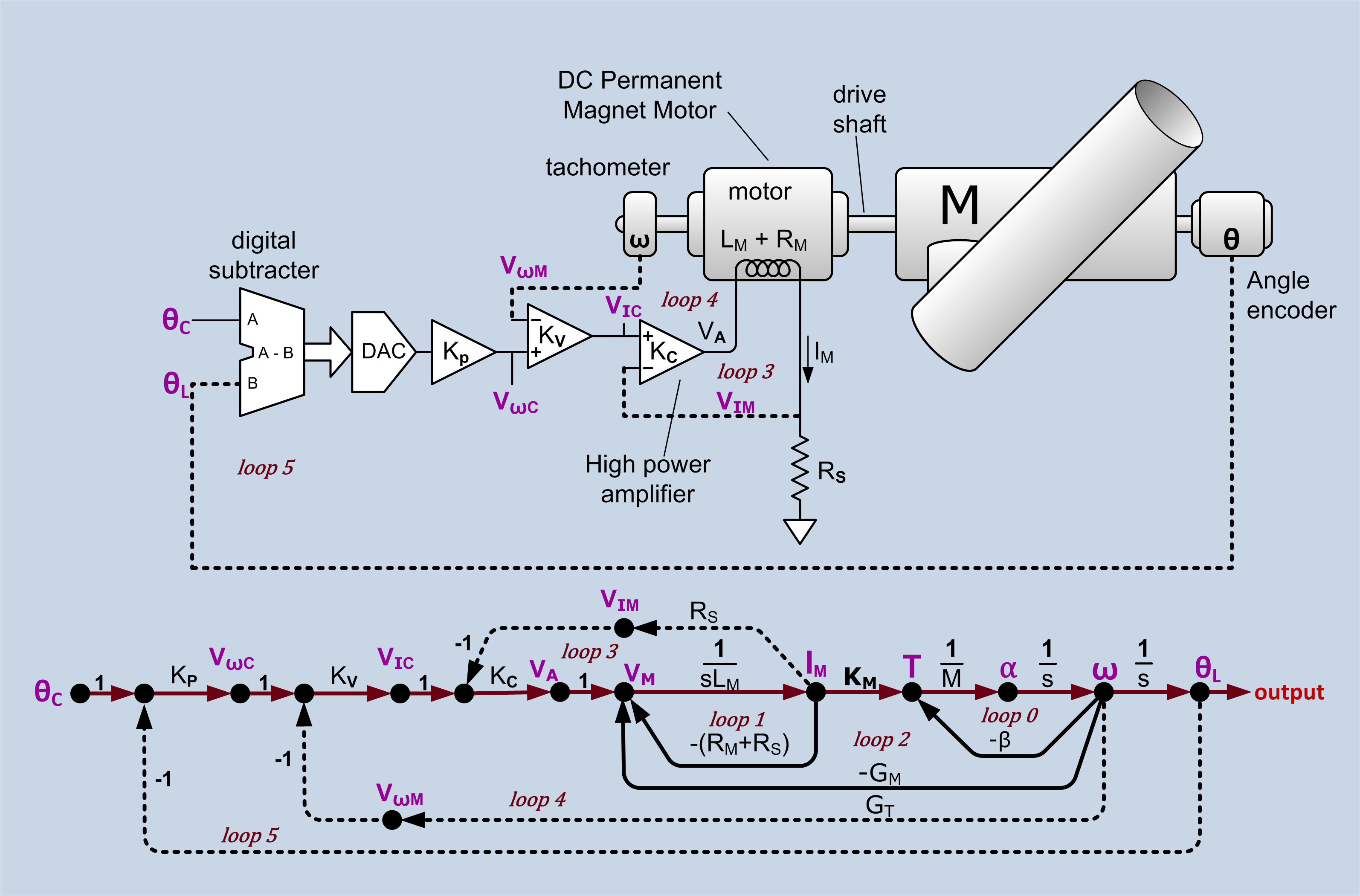
کنترل موقعیت به معنای کنترل میزان جابجایی و حرکت مکانیکی دستگاه ها (اعم از موتورها،جک ها، بازوهای رباتیک،تسمه نقاله ها و انواع لوازم مکانیکی و رباتیک) به میزان دقت های قابل قبول و لازم میباشد، که در مواردی لازم است دقت این حرکت ها و رسیدن به موقعیت مورد نظر، بسیار دقیق باشد همچنین در مواردی لازم است سرعت رسیدن به موقعیت مورد نظر نیز تحت کنترل باشد(نه بسیار سریع و نه بسیار کند).
از این رو برای کنترل 4 پارامتر سرعت،شتاب،گشتاور و موقعیت باید سیستم را بگونه ای طراحی کرد که همزمان این پارامترها را تحت نظر داشته باشد و با تغییر یک پارامتر دیگری تحت تاثیر قرار نگیرد ، در اینجا راه حل ها میتواند طراحی ترکیبی از کنترل بهینه و PID باشد و بهترین سیستم اجرا کننده ی این طرح PLC خواهد بود، شرکت رزان صنعت با توجه به تخصص و تجربه خود توانایی طراحی و اجرای این نوع سیستم را به بهترین نحو دارد و تاکنون 2 پروژه از پروژه های متعدد خود را به روش ترکیبی کنترل بهینه و PID طراحی کرده است :
- -“پروژه چاپ دقیق لیبل بطری با سرعت بالا(4 چاپ در ثانیه)” (شرکت دوغ پاتریس)
- -“پروژه کنترل فشار و سرعت پرس 30 تن در بارهای مختلف” (شرکت استیل شیراز)
از جمله ابزارها و لوازمی که در این سیستم ها باید کنترل شوند : موتورهای AC/DC،پمپ های هیدرولیک، سرووموتورها،جک ها،موتورهای خطی میباشند که توسط انکودرها،خط کش های الکتریکی،لیمیت سوئیچ ها و سوئیچ های غیر تماسی و دیگر سنسور ها مورد سنس قرار میگیرند.